小米机器人仿生手大升级:类似人手大小,拥有全掌触觉、仿生汗腺
时间:26-04-01
小米仿生机器人手深度优化:实现类人操作的关键迭代
今年三月,小米披露其机器人已在自攻螺母上件工站稳定运行3小时,双侧安装成功率达90.2%,精准匹配76秒生产节拍。这一成果标志着机器人技术正式从概念验证迈向工业产线应用。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
然而,对于严苛的制造标准而言,90.2%的成功率尚有优化空间。为此,小米对CyberOne仿生手进行了系统性升级:整体体积缩减60%,完全适配标准工人手部尺寸;自由度提升64%;全掌触觉传感器覆盖面积拓展至8200平方毫米;抓握循环寿命超过15万次;并创新引入仿生汗腺结构以强化散热效能。

此次技术集成的目标清晰:构建一个能在真实工厂环境中实现近100%作业稳定性的仿生操作终端。

突破触觉感知的技术壁垒
在追求百分百可靠性的过程中,研发团队面临两大核心挑战:视觉遮挡下的精细触觉操作依赖,以及低效遥操作模式导致的数据采集瓶颈。
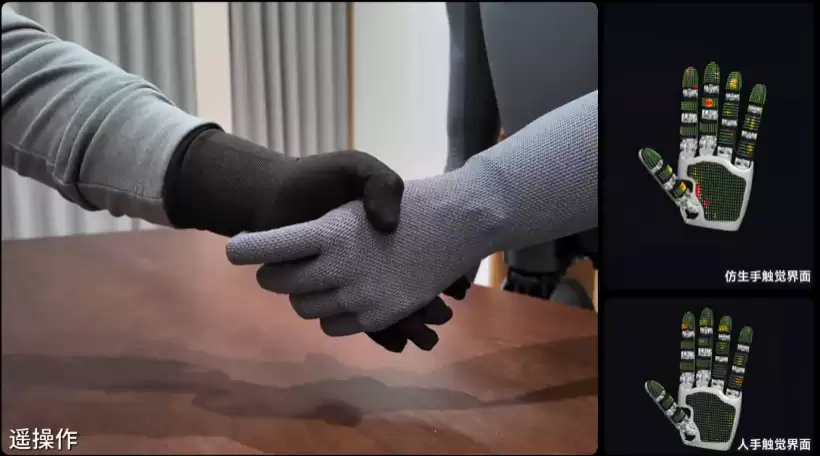
“触觉手套”方案的引入开辟了新路径。其优势有三:实现从指尖到掌心的全域触觉覆盖;支持人类直接穿戴以高效生成真实操作数据集;作为标准化耗材,显著降低了系统维护复杂度。测试证实,人手与仿生手通过同款手套执行相同动作时,触觉数据表征高度一致,为数据迁移奠定了技术基础。
要最大化利用人类数据,仿生手必须实现与真人手的生物力学对齐。这不仅要求1:1的尺寸与构型匹配,更需在运动空间、驱动扭矩、惯性分布及动态响应等维度高度拟真,从而弥合仿真环境、实体硬件与人类操作模式之间的语义鸿沟。
尺寸工程:紧凑化、高自由度与可靠性验证
基于此,一场针对已有高成功率原型的“紧凑化增能”改造全面展开。最终实现体积压缩约60%(优化至187mm * 88mm * 36mm),总自由度提升50%,其中主动自由度增幅达83%。

然而,在有限空间内集成人手级别自由度(22-27个)对硬件可靠性构成严峻考验。实际工厂测试显示,即使是基础抓放动作,内部腱绳、弹簧等部件在万次循环内即可能出现疲劳失效。
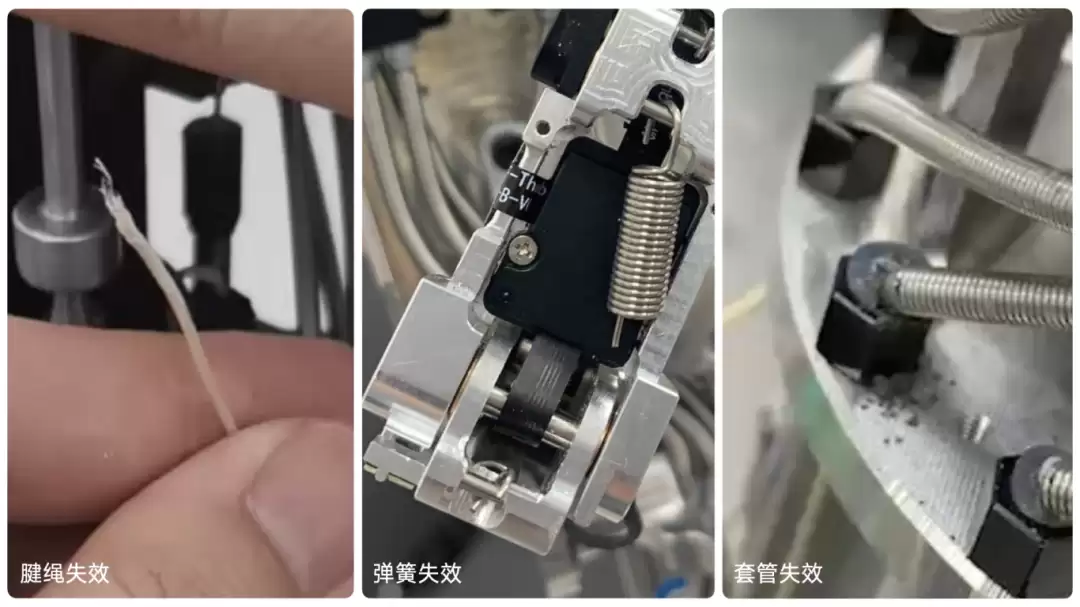
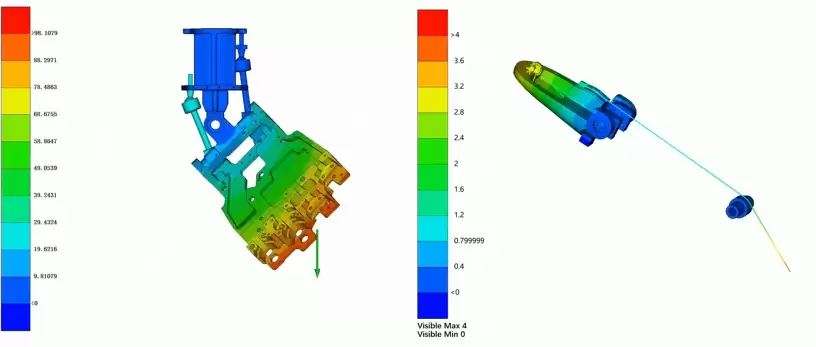
应对策略是建立“设计-仿真-测试”的闭环迭代流程。针对特定作业场景,对每个微构件进行耐久性仿真与优化,从而系统性提升整手可靠性。经一年攻坚,新一代仿生手在抓握工况下已实现超过15万次循环寿命,并能持续稳定采集触觉数据。

仿生汗腺:应对高功率密度的热管理方案
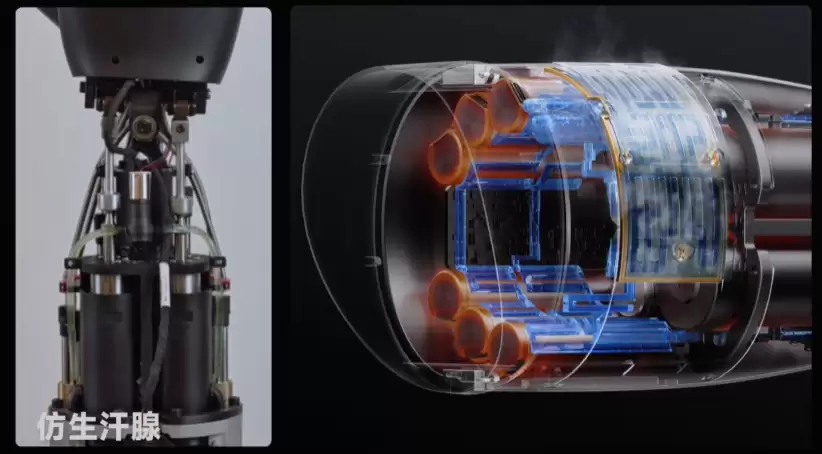
更多主动自由度意味着电机密度急剧增加。在重载作业中,单手机器人关节功率可超100瓦,其中大量能量转化为热能,尤其在电机堵转等工况下,散热能力直接决定持续作业时长。
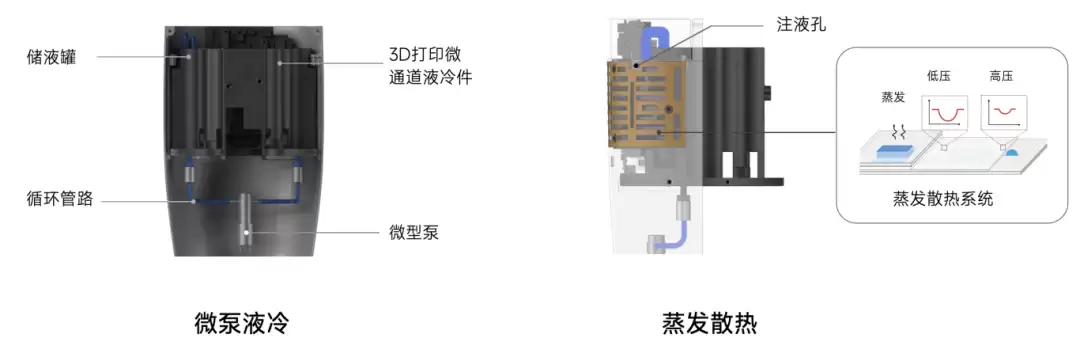
除被动散热外,团队借鉴生物蒸发散热机制,开发出仿生汗腺系统。在室温下,1毫升水蒸发可吸收超过2000焦耳热量。通过金属3D打印在小臂结构内制造微型液冷通道,利用微型泵将电机热量输送至蒸发区,借助水分相变快速降温。
实测表明,该系统每分钟蒸发0.5毫升水,提供约10瓦的主动散热能力,确保了仿生手在长时间高负荷运行下的热稳定性。
拟人化运动:基于触觉数据与AI的行为生成
硬件是基石,而让机械动作呈现类人的柔顺性与自适应性才是终极目标。小米致力于使仿生手具备与人手相当的运动范围、动态速度、负载能力及包覆式抓握质感。
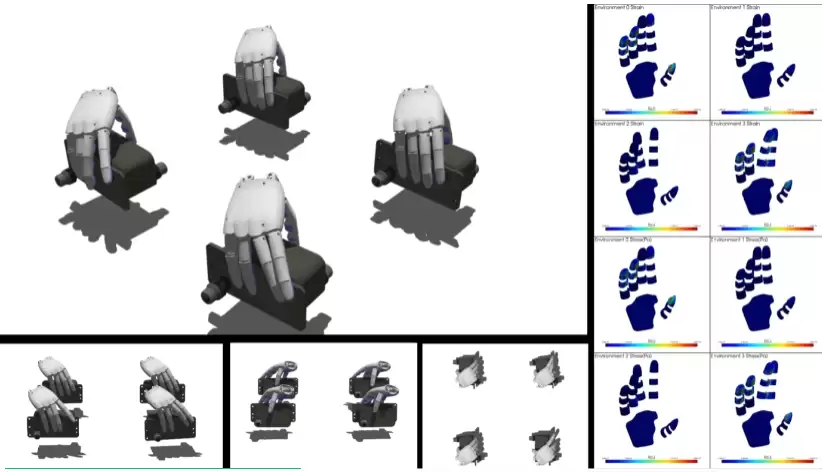
实现路径深度融合数据驱动与人工智能。首先大规模采集人类手部抓握数据;随后在仿真环境中融合多模态触觉信息,运用模仿学习与强化学习算法对海量数字模型进行训练;最终由AI自主生成高度拟人的灵巧抓握姿态与力度控制策略。
通过尺寸工程、可靠性攻坚、仿生散热与拟人算法这四大技术支柱的协同,小米仿生手已具备执行复杂装配任务的潜力。目前实验室正推进更多依赖高精度触觉反馈的精细操作研究,机器人手部技艺正持续向人类灵巧度逼近。

这就是小米机器人仿生手大升级:类似人手大小,拥有全掌触觉、仿生汗腺的全部内容了,希望以上内容对小伙伴们有所帮助,更多详情可以关注我们的菜鸟游戏和软件相关专区,更多攻略和教程等你发现!
专题合集
精彩合集,奇葩无下限相关文章








大家还在看
-
- 《洛克王国:世界》功能辅助使用攻略
-
26-04-01
-

- 明清鸟羽防具解析:名品排名与护具指南
-
26-04-01
-

- 羊皮纸之魂伊库帕苏伊获取方法:三种可靠途径指南
-
26-04-01
-

- 魔兽世界12.0前夕:防战天赋加点全解析
-
26-04-01
-

- 神探诡事录体力怎么玩
-
26-04-01