在飞书上接入OpenClaw:实现手机远程控制电脑的完整指南
如何直接在飞书中远程控制你的办公电脑?通过将OpenClaw智能助手集成至飞书机器人,即可实现移动端对PC的便捷操控。本指南将详细拆解从飞书开放平台配置到本地OpenClaw部署的全流程。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
飞书端操作
一、注册账号并登录
首先,你需要拥有一个飞书开放平台的开发者账号。请访问飞书开放平台官网进行注册。
官方地址:https://open.feishu.cn/
二、进入开发者后台
注册成功后,点击页面右上角的【开发者后台】入口,所有后续配置均在此界面完成。

三、创建机器人
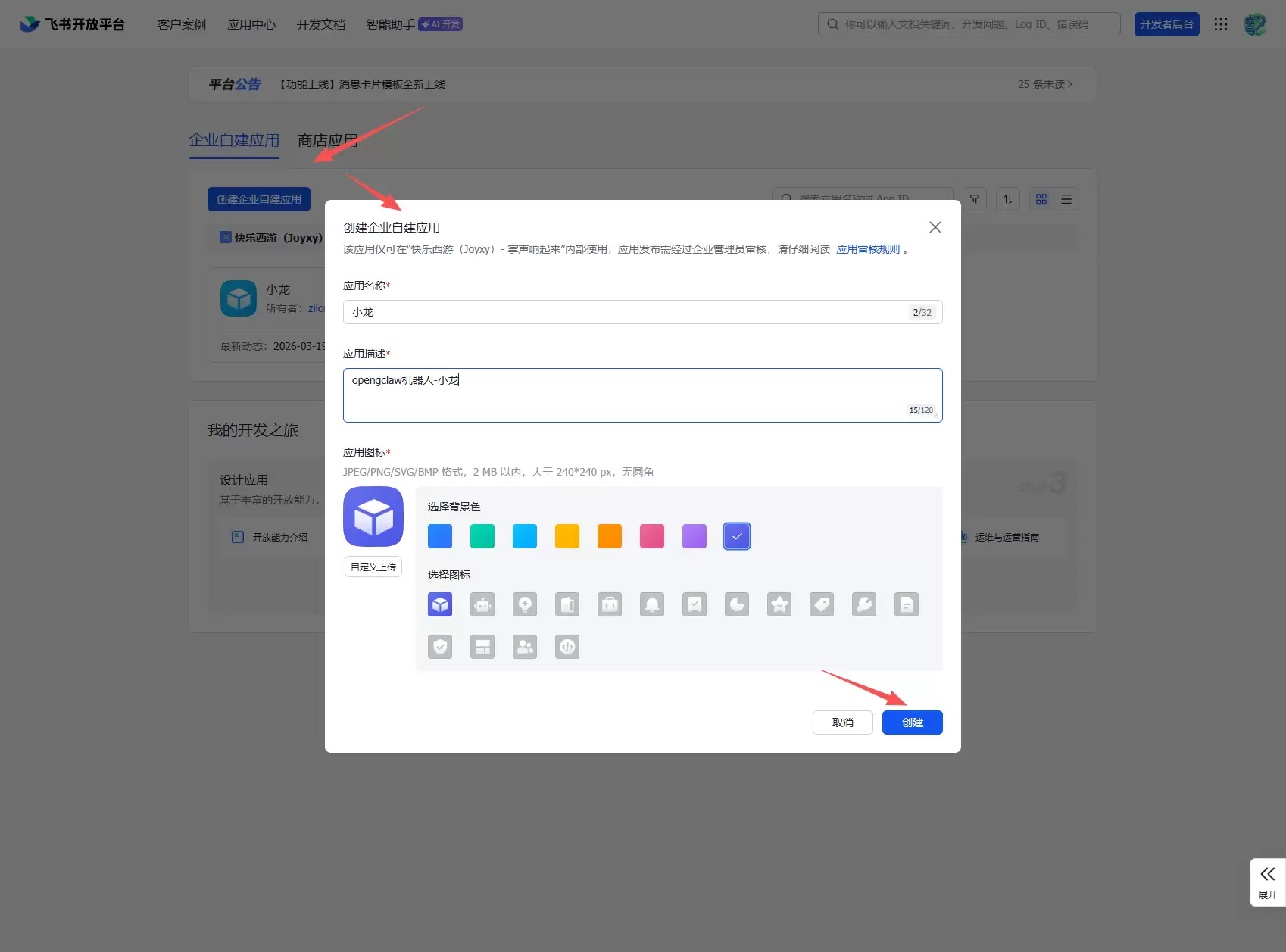
1、新建企业应用
在开发者后台,点击【创建企业自建应用】。按指引填写应用名称和描述等基本信息,完成创建。此步骤是为你的远程控制机器人创建基础应用实体。
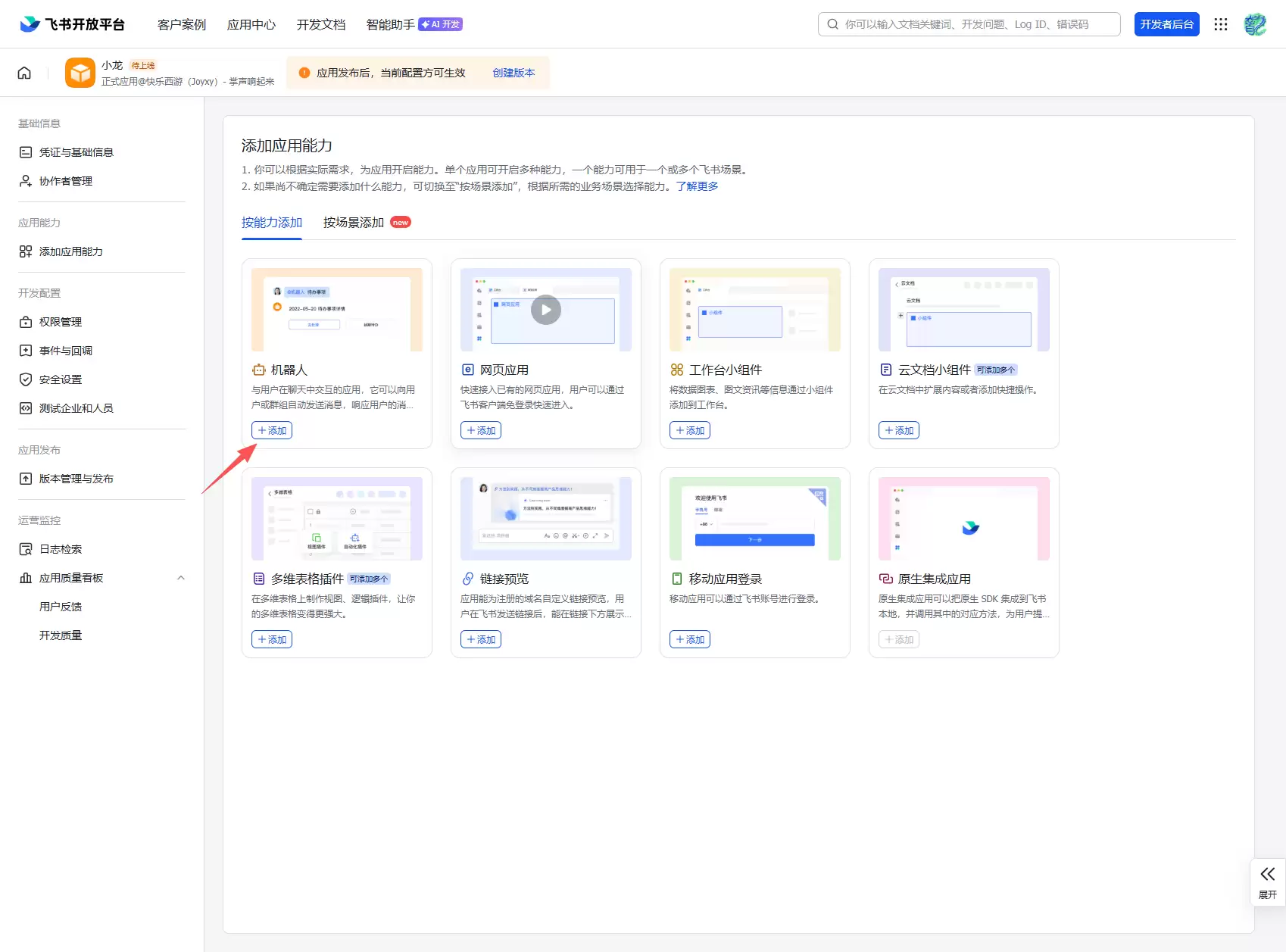
2、添加应用能力
应用创建后,需为其启用机器人功能。在应用功能列表中找到“机器人”选项,点击【添加】。此操作是激活机器人交互能力的前提。
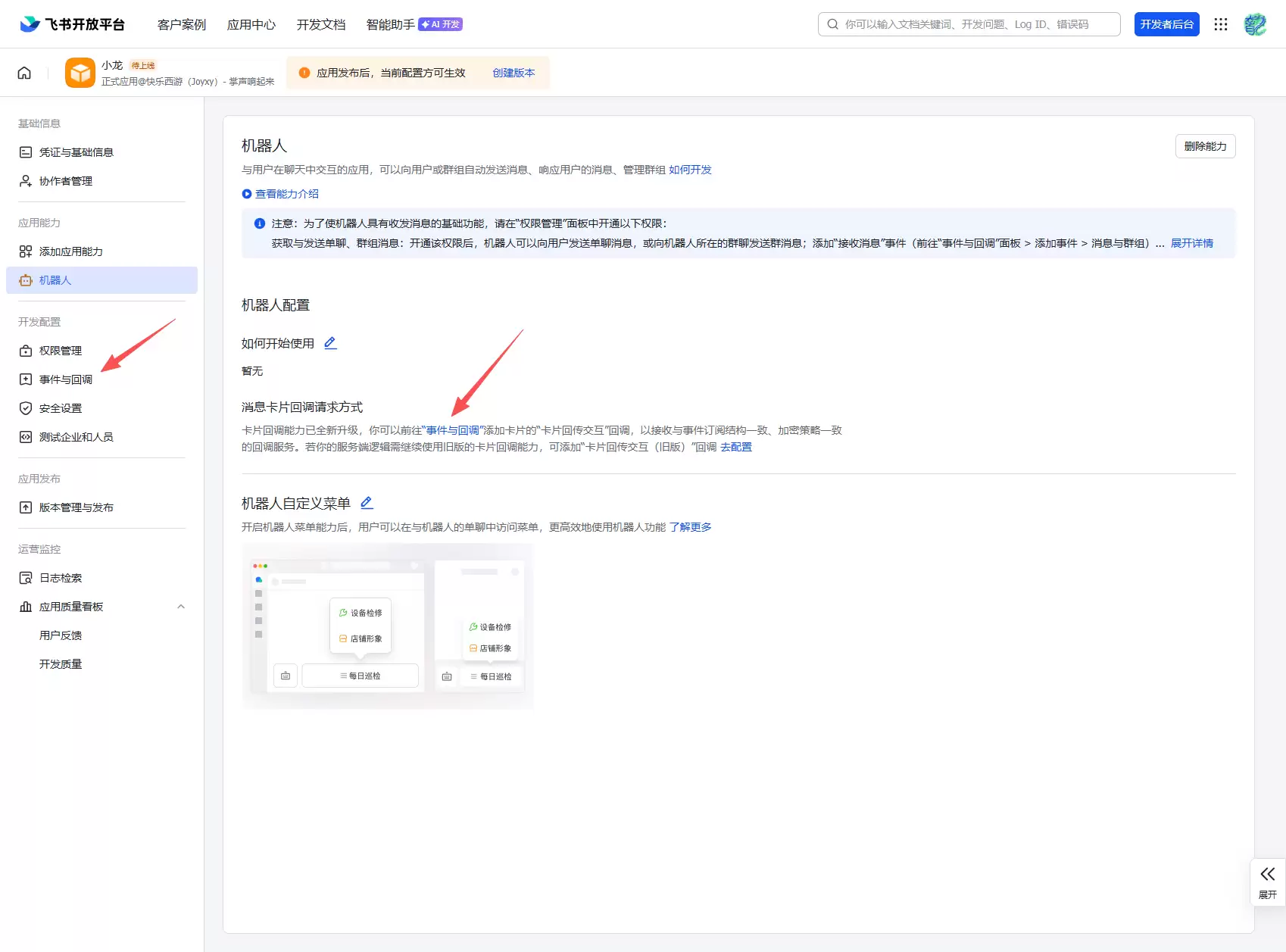
3、配置事件和回调
为建立机器人实时通讯通道,需配置事件订阅与回调。事件用于接收通知,回调用于处理即时交互请求。以下为关键配置步骤。
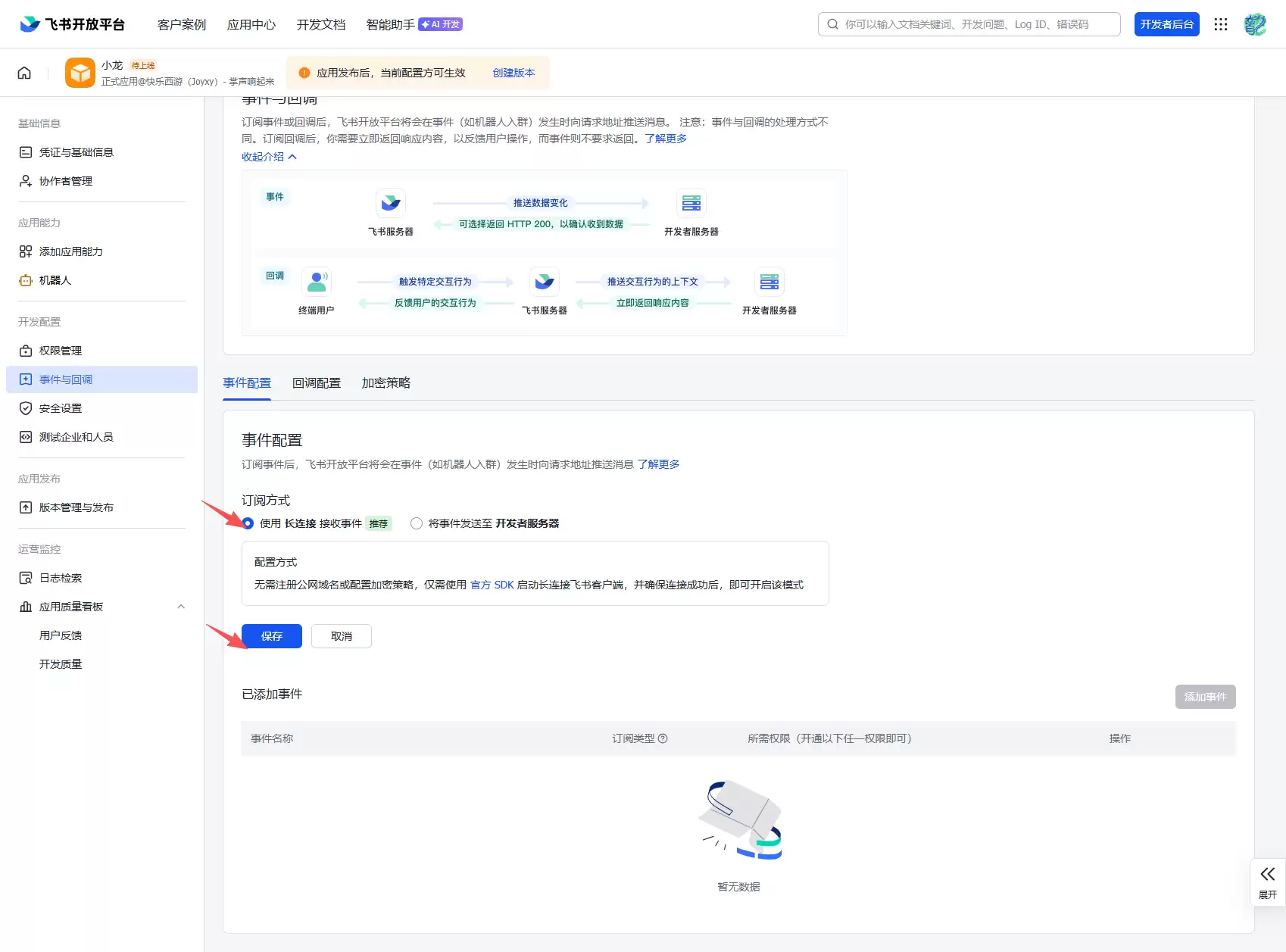
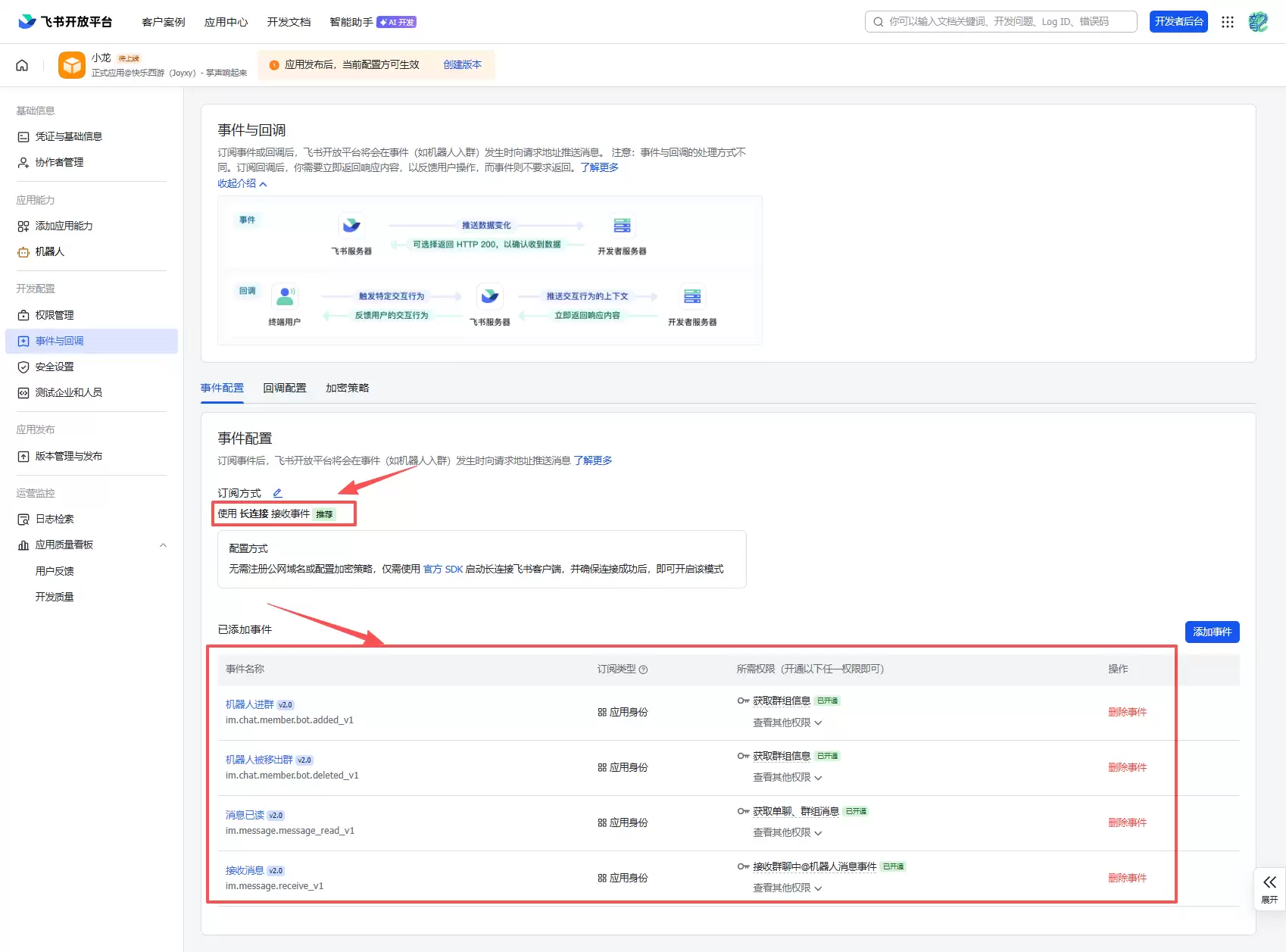
首先,在左侧导航栏进入【事件与回调】页面。
事件配置(长连接)
点击【订阅方式】旁的编辑图标开始配置。
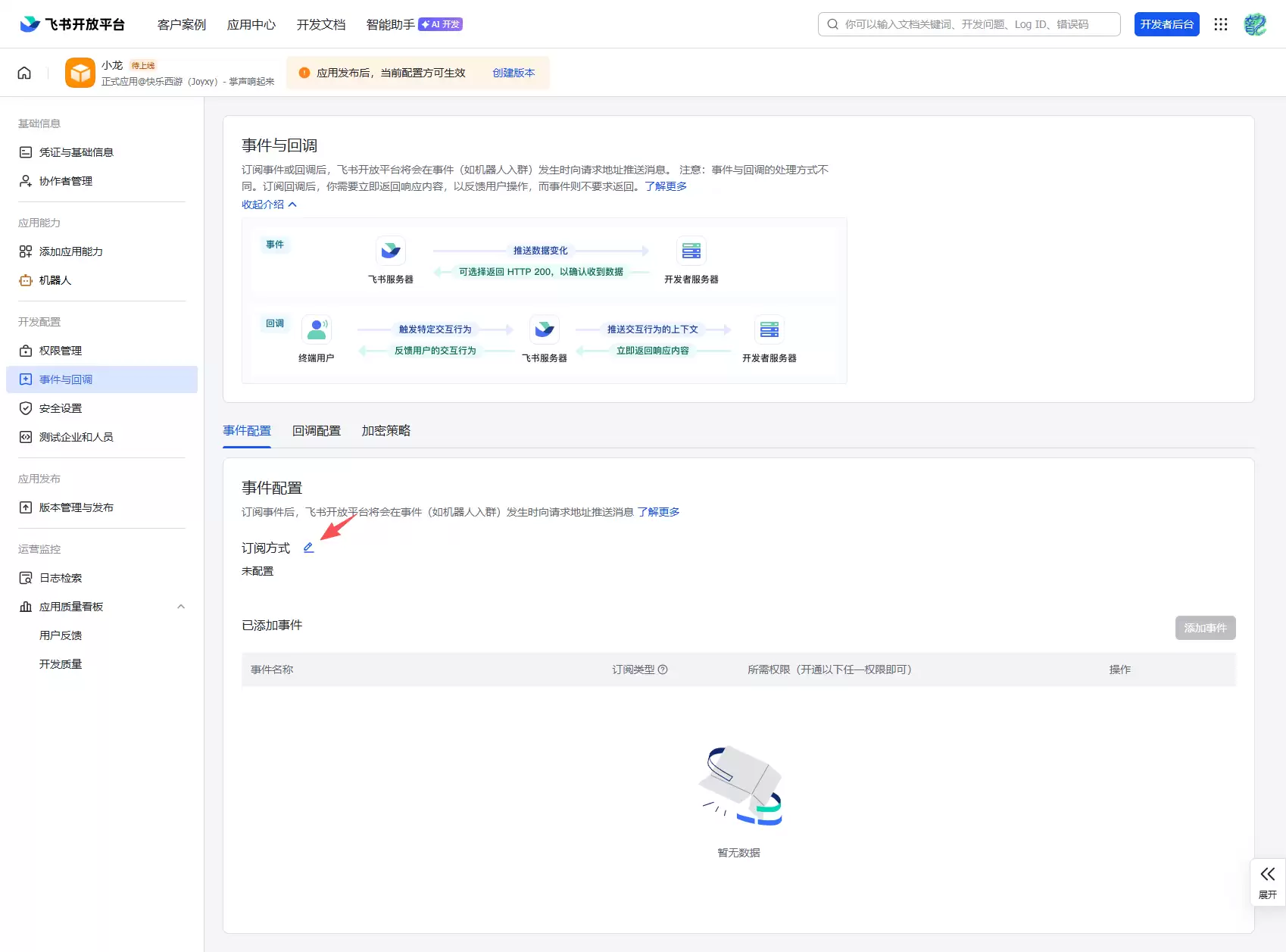
订阅方式
选择【使用长连接】作为事件接收方式,点击【保存】。长连接模式保证了指令传输的及时性与稳定性。
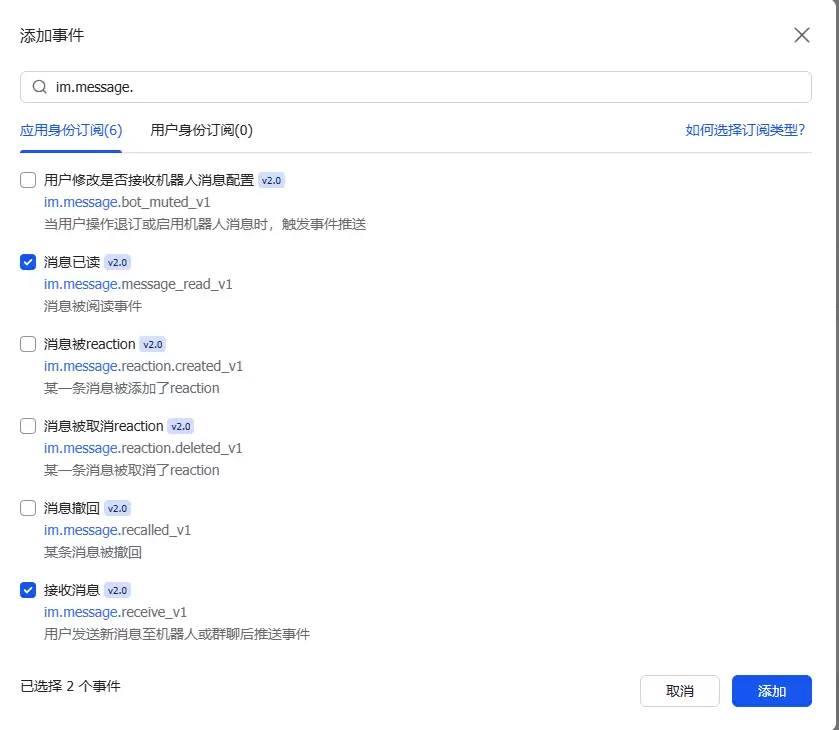
添加事件
搜索并添加以下核心事件权限。这些是机器人接收与响应指令的底层支持:
im.message.receive_v1 (核心!接收用户消息)
im.message.message_read_v1 (消息已读状态回执)
im.chat.member.bot.added_v1 (机器人被添加至群聊)
im.chat.member.bot.deleted_v1 (机器人被移出群聊)
关键点:im.message.receive_v1 事件必须订阅。缺少此项,机器人将无法接收任何来自飞书的远程控制指令。
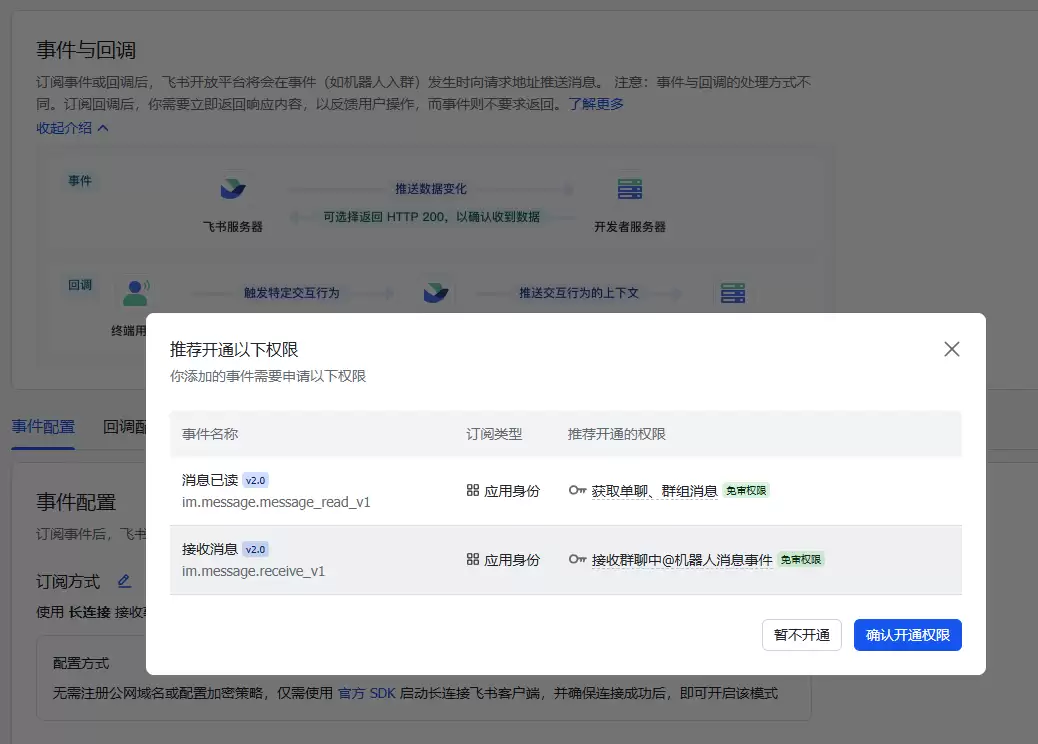
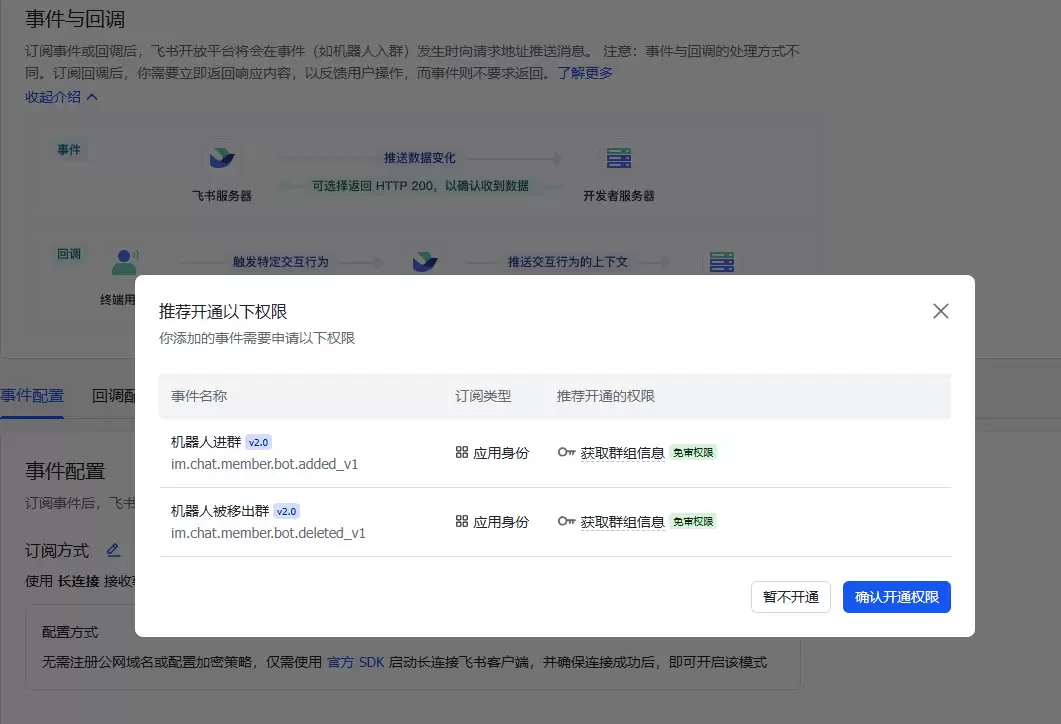
添加事件时,系统可能提示开通对应API权限,请按流程逐一确认开通。

最终确认
配置完成后,请核查两点:订阅方式已设置为“长连接”,且所有必需事件均出现在“已添加事件”列表中。确认无误后此部分配置完成。
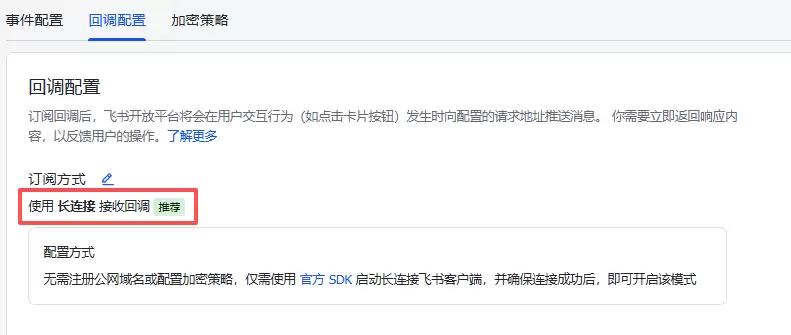
回调配置(长链接)
回调配置原理相同。同样将订阅方式设置为【长连接】,操作流程与事件配置一致。
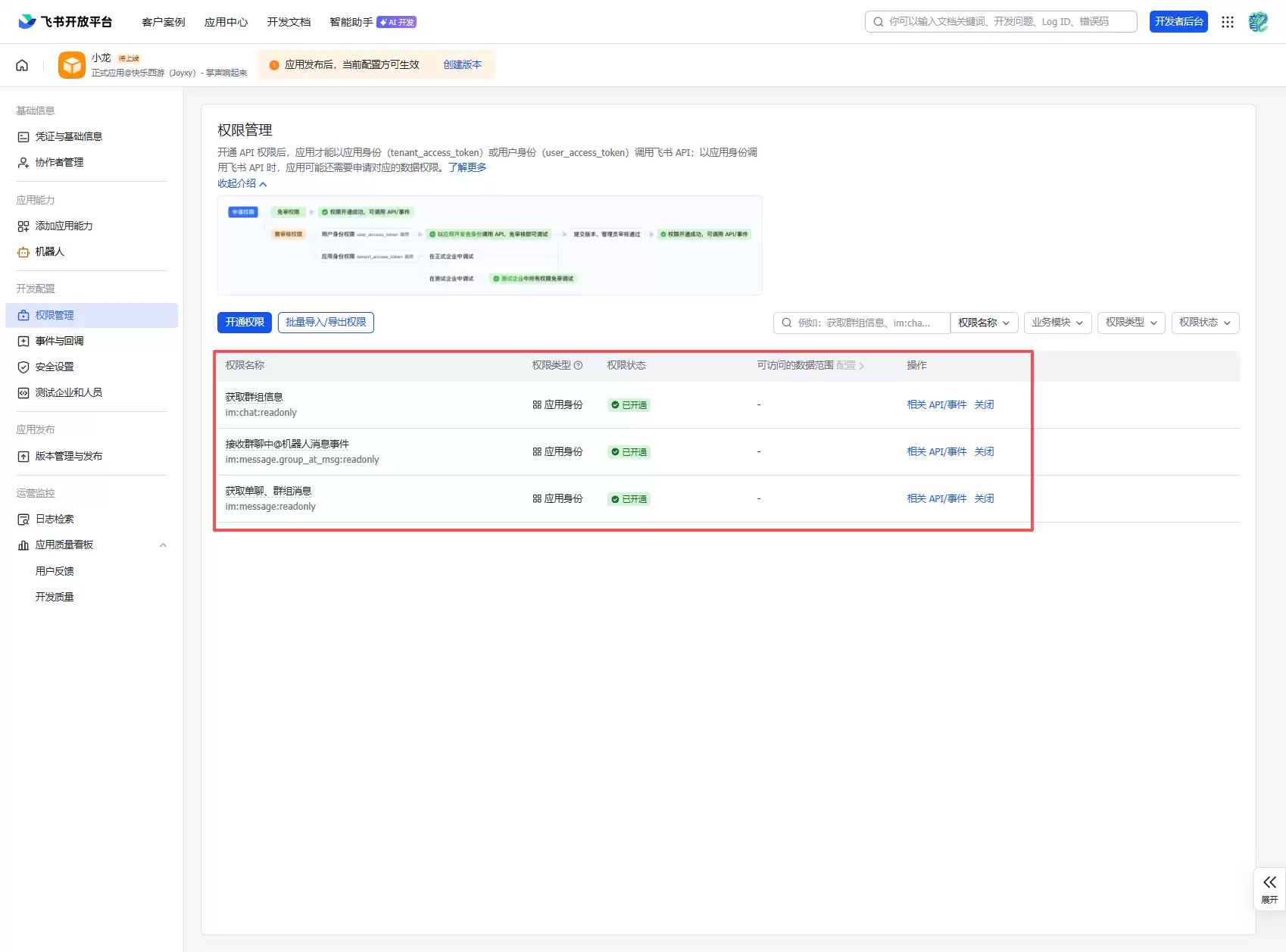
4、权限管理
为确保机器人能正常调用飞书API,需检查其权限范围。多数核心权限在添加事件时已自动申请。你可以在本页面复核,如有访问用户或组织架构等额外需求,可在此添加对应权限。
5、发布
完成配置后,需要发布应用以生效。进入左侧【版本管理与发布】。
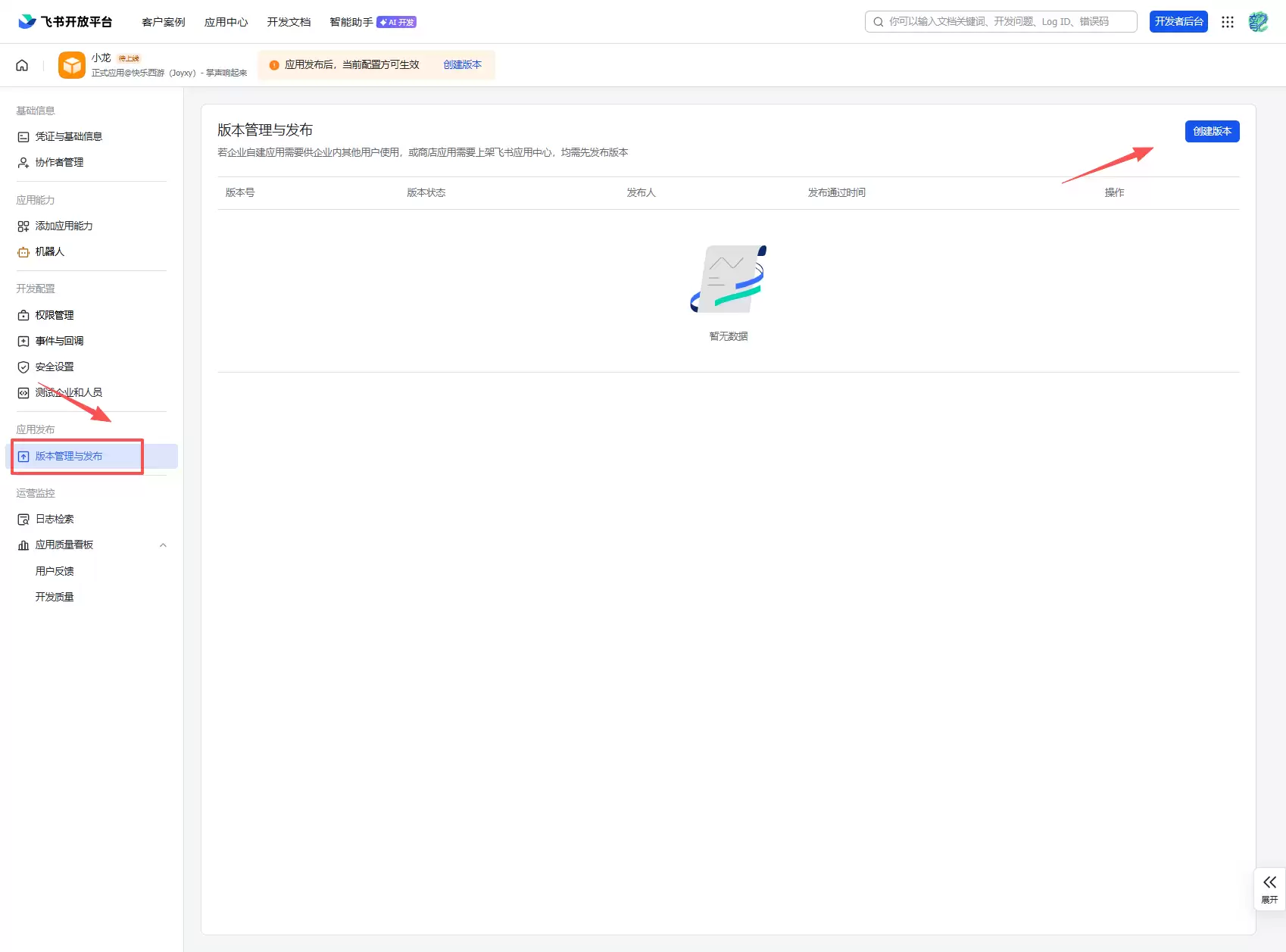
点击【创建版本】,填写初始版本号(如1.0.0)及版本说明。
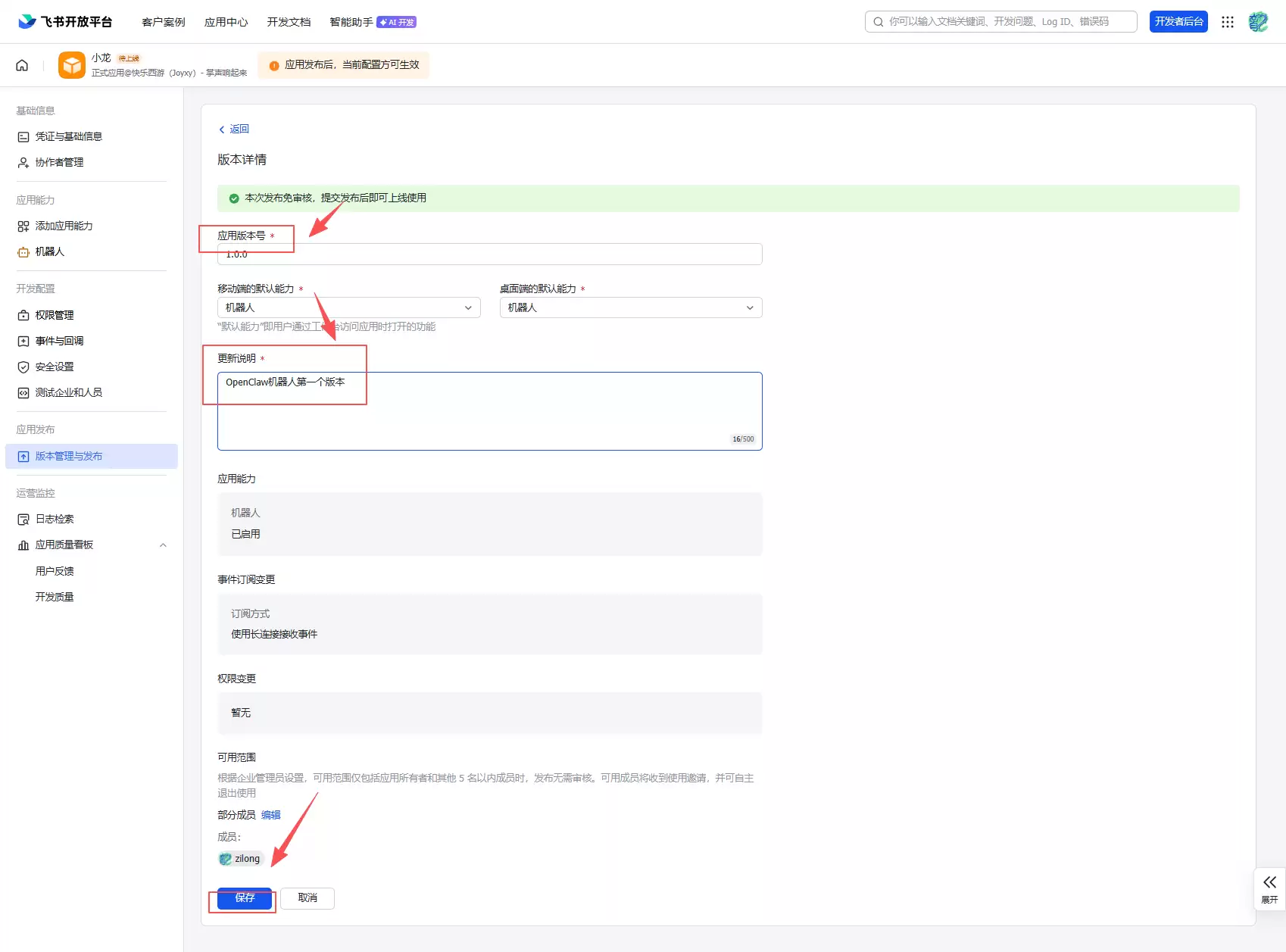
创建后,点击确认提交发布申请。发布过程可能需要短暂审核。
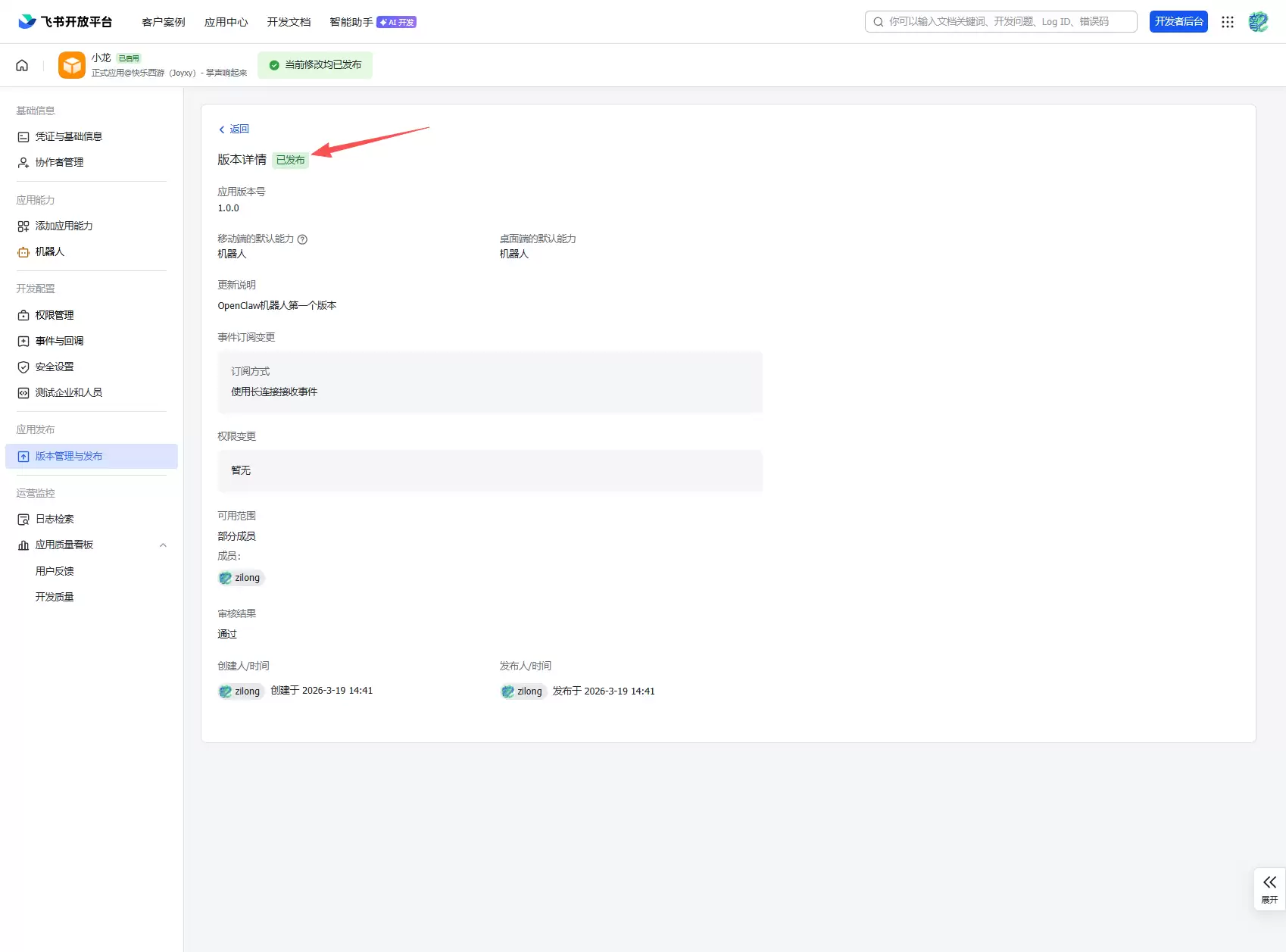
当应用状态由“审核中”变为“已发布”,即表示飞书端配置全部完成。
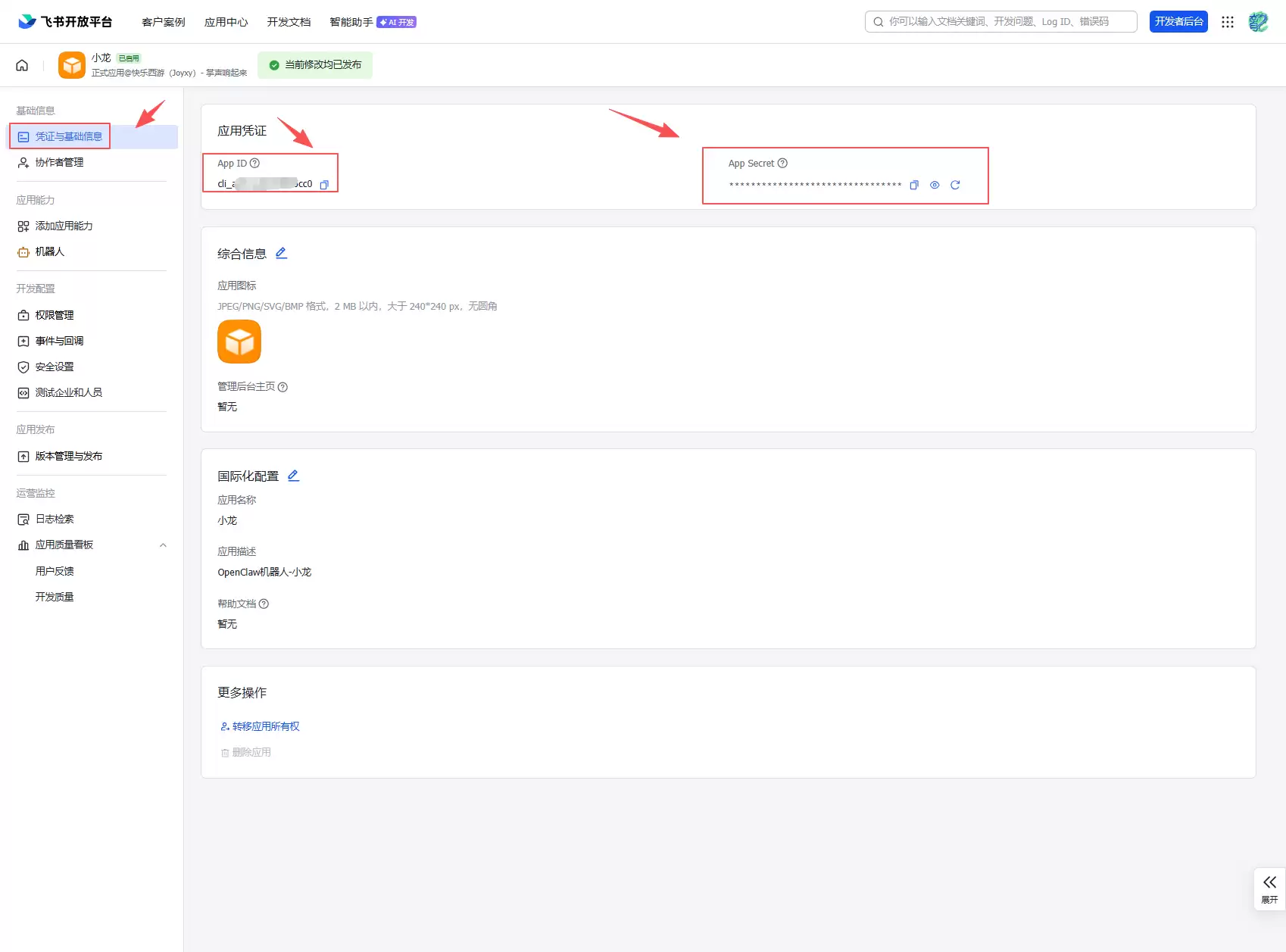
四、查看机器人的ID及key
进入【凭证与基础信息】页面,获取并妥善保存“App ID”和“App Secret”。这是后续在OpenClaw端建立连接的核心身份凭证。
OpenClaw端操作
一、安装OpenClaw
请先在目标电脑上完成OpenClaw基础环境的安装与部署。具体步骤请参考官方安装文档。
二、OpenClaw安装飞书官方插件
1、执行插件安装命令
在终端中运行以下命令以安装飞书官方插件。如遇权限问题,请尝试在命令前添加 sudo。
npx -y @larksuite/openclaw-lark install
2、登录手机端扫码,选择已有机器人配置
命令执行后,终端将显示二维码。请使用手机飞书App(需具备应用管理权限的账号)扫码授权。

登录后,在应用列表中选择先前在飞书开放平台创建的那个机器人应用。

选择后,相关管理员的飞书通常会收到一条安装审核申请。
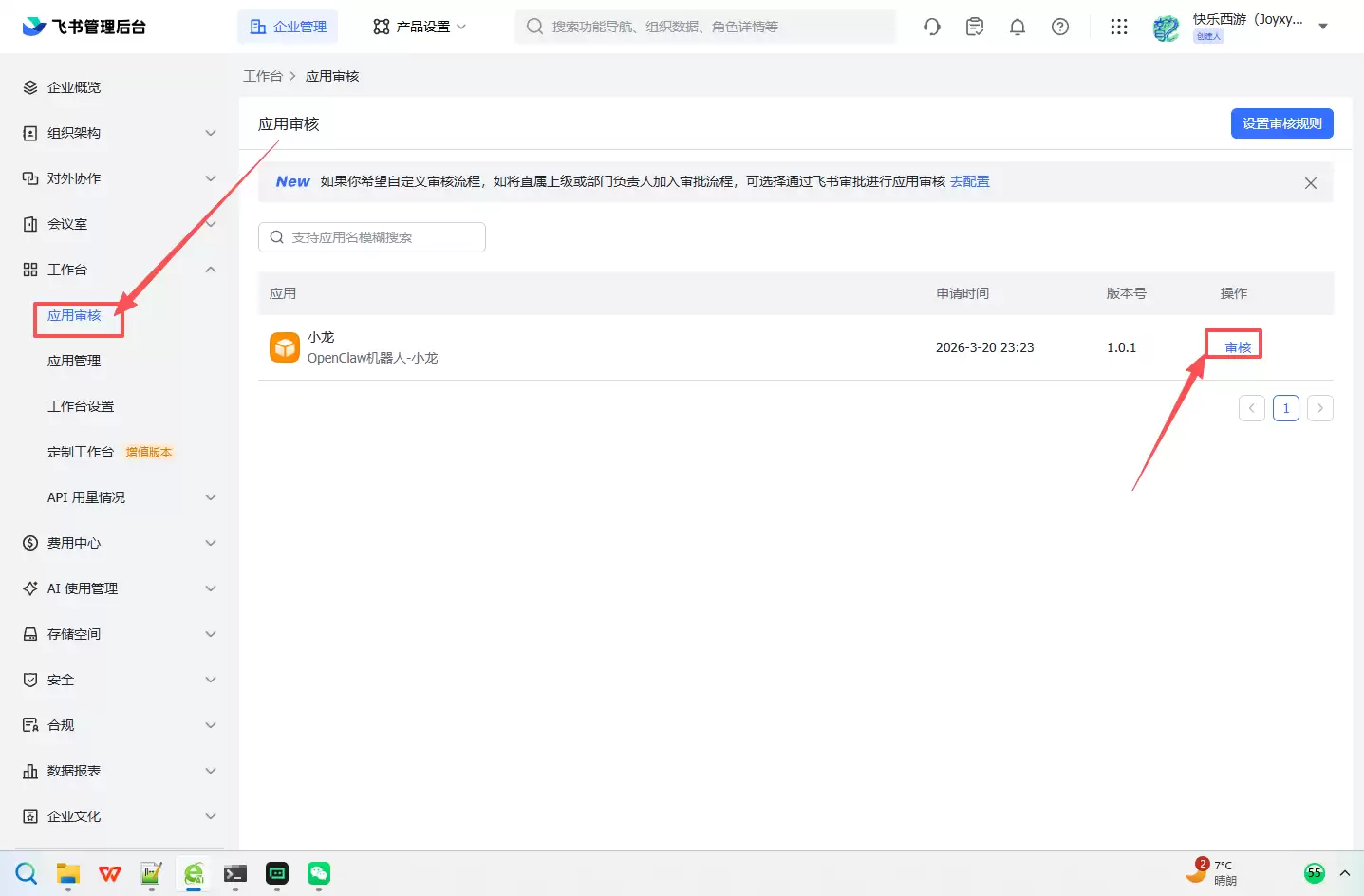
此时,需使用具备管理后台权限的账号登录飞书管理后台,批准此应用的安装请求。
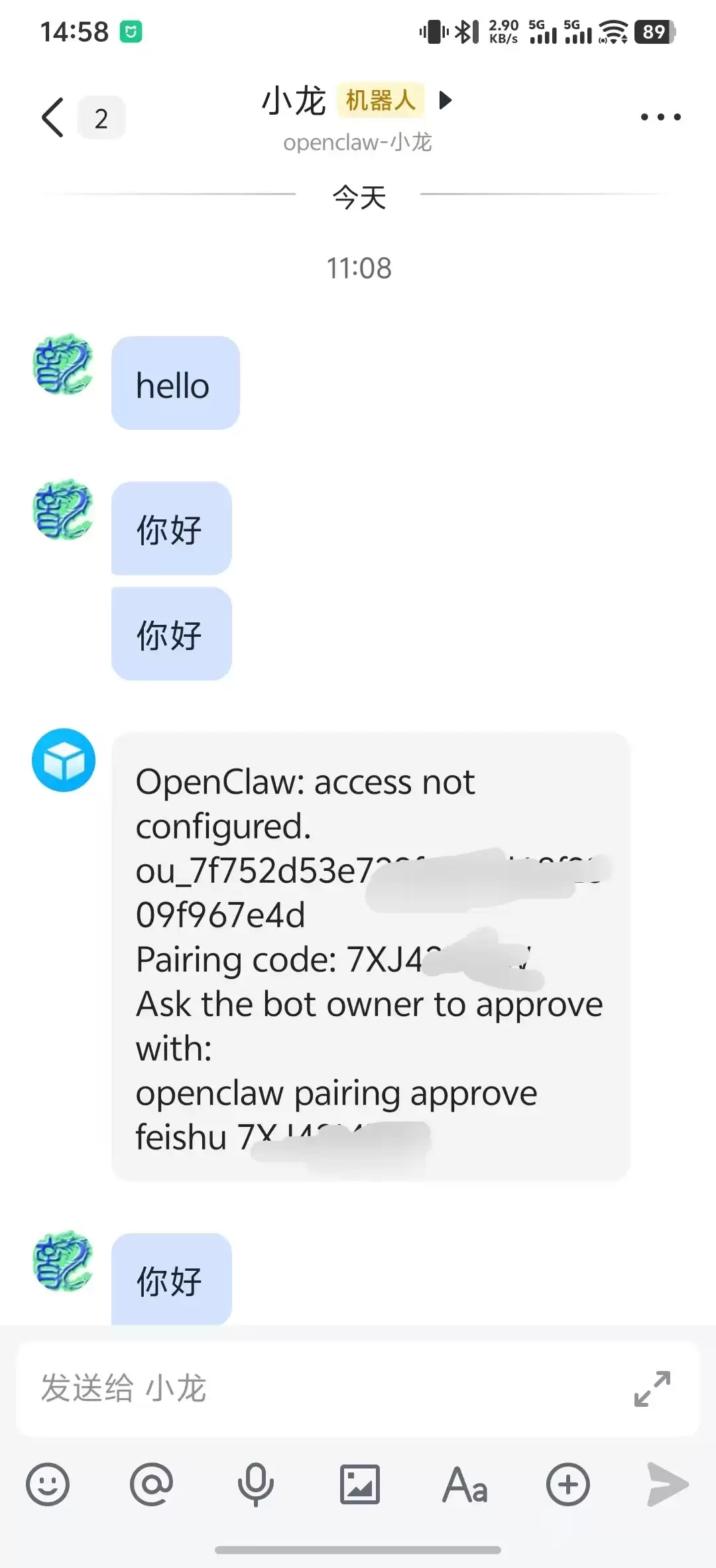
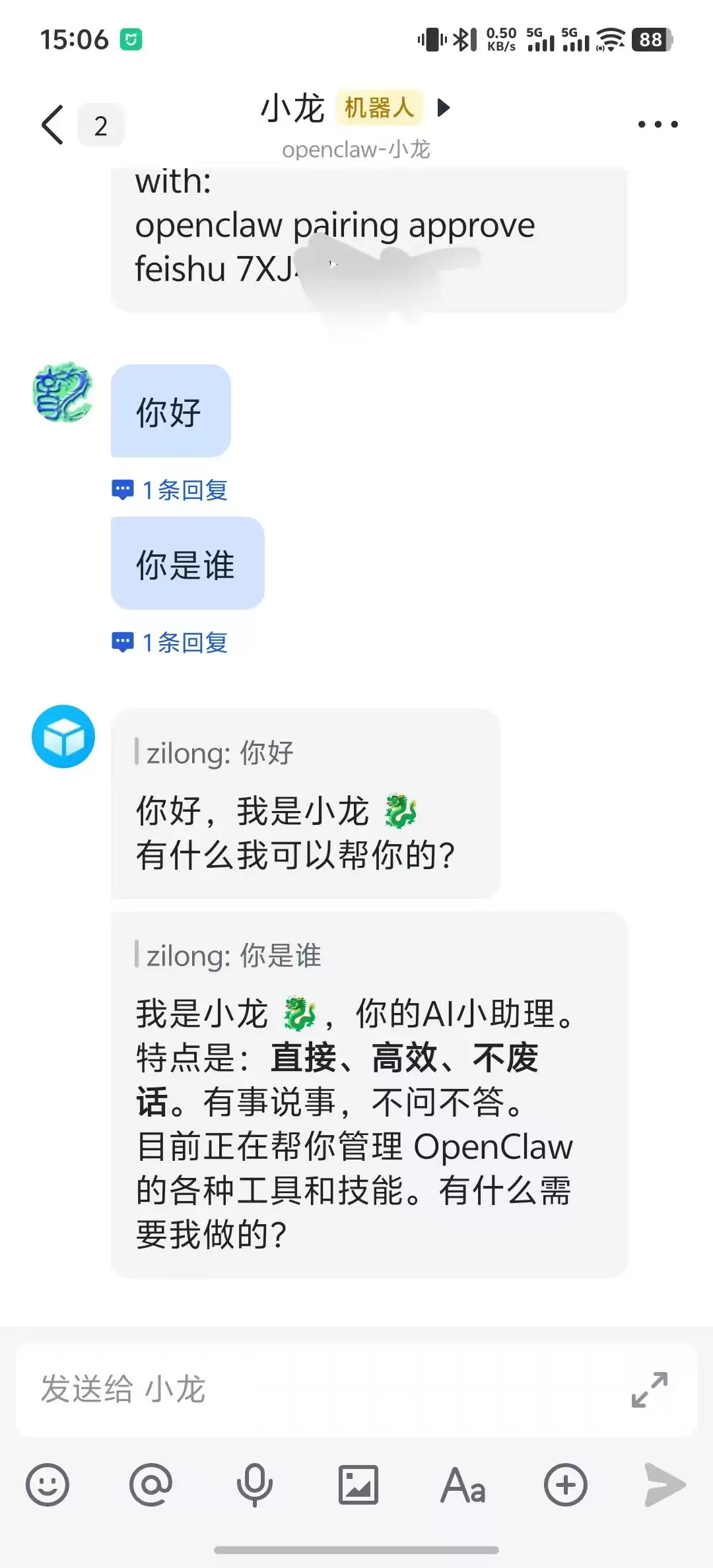
3、飞书端发个消息
审核通过后,在手机飞书中找到该机器人,发送一条测试消息,如“测试”。配置正确时,OpenClaw终端将返回包含配对码的响应信息。
4、配对授权
复制OpenClaw返回信息末尾的完整配对命令(内含配对码),在终端中执行。命令格式示例如下:
# 配对授权
openclaw pairing approve feishu <返回的配对码>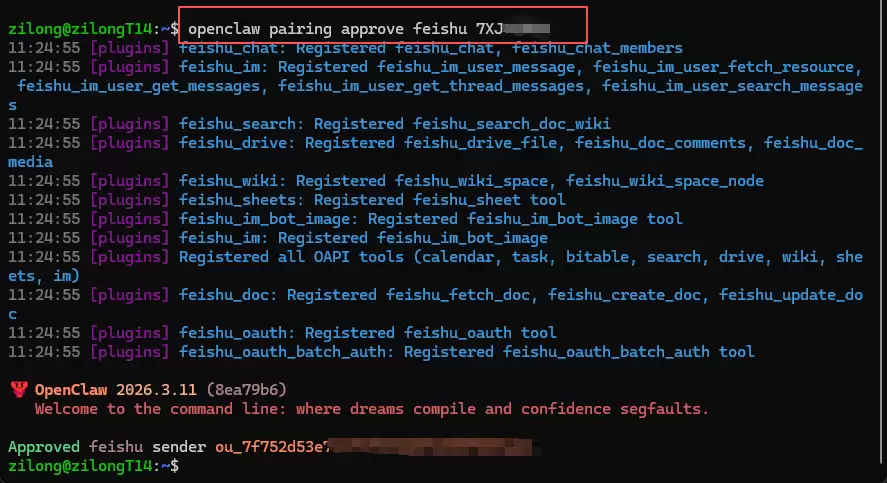
5、验证是否正常
配对成功后,飞书至OpenClaw的远程控制链路即告建立。此时,你已可以通过手机飞书向机器人发送指令,远程操控电脑执行任务。
这就是OpenClaw接入飞书(channel)的全部内容了,希望以上内容对小伙伴们有所帮助,更多详情可以关注我们的菜鸟游戏和软件相关专区,更多攻略和教程等你发现!
专题合集
精彩合集,奇葩无下限相关文章
- 如何关闭高德地图导航语音-高德地图导航语音关闭方法
- 如何查询我的常德无犯罪记录证明-我的常德无犯罪记录证明查询方法
- 咔皮记账怎么同步多设备-咔皮记账如何在多设备间同步
- 知犀思维导图app如何更改颜色-知犀思维导图app怎样变换颜色
- 贾跃亭宣布法拉第未来月底将超额完成机器人首月 20 台交付目标
- 消息称魅族 AR 眼镜品牌 StarV 的 AR 系统团队整体入职雷鸟创新
- realme 全面接入 OPPO 售后服务网络:即日开启过渡整合,4 月起统一提供支持
- openClaw常用操作命令
- openclaw[龙虾]禁用版本升级提示
- 古尔曼:苹果 CEO 候选人 John Ternus 广受高层欢迎,曾扭转产品质量下滑局面








大家还在看
-

- 《神火大陆》希尔神域第11层奇遇任务1攻略
-
26-04-01
-

- 金铲铲之战S17拉亚斯特技能费用介绍
-
26-04-01
-
- 金铲铲之战阿狸的光坏神器效果一览
-
26-04-01
-

- 《蓝色星原:旅谣》芃芃介绍
-
26-04-01
-

- 《无径之林》建筑雕像解锁条件介绍
-
26-04-01