当 AI 开始走向物理世界:元萝卜成为 OpenClaw 生态中的“实体交互”新样本
时间:26-04-06
OpenClaw 开源项目的“养龙虾”AI交互范式迅速引爆社区,成为开发者与科技爱好者热议的焦点。
然而,当前大多数关于 OpenClaw 的应用探索,依然局限于数字领域——文档与数据处理等虚拟任务仍是常态。能够从数字指令延伸至物理实体,在真实环境中完成交互落地的产品,目前仍属凤毛麟角。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
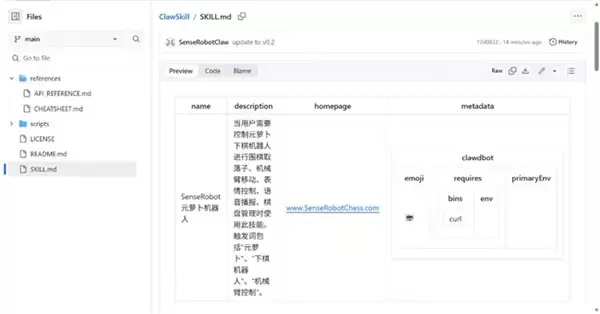
这也使得具备“实体交互”能力的产品显得尤为突出。以商汤科技推出的元萝卜为例,其开放的 OpenClaw skill 接口正吸引众多开发者进行尝试,旨在验证 AI 在现实世界中的感知与执行潜力。
依托其成熟的视觉感知技术与机械臂实体操作能力,元萝卜已被行业视为极少数已实现量产、并具备可靠物理交互能力的标杆产品之一。这促使我们思考:它是否能从最初定位的“下棋机器人”,演进为一个更具通用价值的“桌面智能体”?
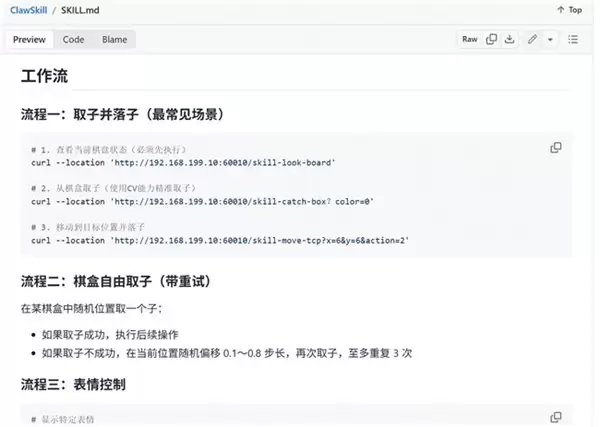
在今年(2026年)的 AWE 博览会上,结合 OpenClaw 的构想,元萝卜的进化路径已初见雏形:用户通过自然语言指令,即可驱动机械臂完成棋子的精准抓取、定位摆放乃至组合构图。其应用场景正从桌面自动化、互动展示延伸至 AI 教育实验等领域,推动 AI 从单纯的“内容生成”迈向“物理动作执行”,真正赋能用户将创意转化为现实。

融合视觉感知与机械执行,元萝卜助力 OpenClaw 突破桌面物理交互瓶颈
当前,尽管大模型与智能体技术快速发展,大多数 AI 应用仍停留在虚拟界面交互,难以实现对物理世界的直接影响与操作。
元萝卜的核心价值在于弥补了这一断层。基于商汤科技在计算机视觉领域的长期技术积淀,它通过高精度视觉系统实时解析桌面环境,精准识别物体位姿与空间关系,并驱动机械臂完成安全、可靠的抓取与摆放操作。
因此,OpenClaw 与元萝卜的结合,与多数局限于屏幕内的 AI 应用形成了鲜明对比:自然语言指令由此转化为一系列可感知、可决策、可执行的实体动作,形成了完整的“感知-决策-执行”闭环。凭借这一成熟的硬件能力,AI 得以实现从物体识别到实体操控的跨越。可以说,在 OpenClaw 生态中,元萝卜正扮演着“家用实体终端”的角色,为 AI 在物理环境中的应用提供了切实可行的落地方案。
从垂直场景到开放平台:元萝卜向“通用桌面智能体”演进
此次与 OpenClaw 的深度集成,清晰地揭示了元萝卜从“专用下棋机器人”向“通用桌面智能体”演进的可能性。
开发者、学生与科技爱好者均可借助 OpenClaw 的自然语言界面,探索元萝卜在实体环境中的多样化操控任务。其应用已不限于对弈,更可拓展至 STEAM 教育、编程学习、创客制作及 AI 科研演示等多个维度。这条由开发者生态驱动、从垂直功能走向开放平台的路径,为消费级 AI 硬件开辟了全新的应用视野。
展望未来,随着机器人技术普及与开源生态成熟,AI 智能体将持续模糊虚拟与现实的边界,从数字世界走向物理空间。以元萝卜为代表的消费级智能终端,作为 AI 能力触达用户的关键载体,将在开源生态的赋能下,持续解锁更丰富、更具创意且贴近日常的应用场景,为用户带来兼具实用性与启发性的智能体验。
这就是当 AI 开始走向物理世界:元萝卜成为 OpenClaw 生态中的“实体交互”新样本的全部内容了,希望以上内容对小伙伴们有所帮助,更多详情可以关注我们的菜鸟游戏和软件相关专区,更多攻略和教程等你发现!
专题合集
精彩合集,奇葩无下限相关文章








大家还在看
-

- 心之钥结局怎么解锁
-
26-04-09
-

- 中医正骨疗法包括什么
-
26-04-09
-

- 噬血代码2思念交汇之地成就奖杯如何做
-
26-04-09
-

- 灵兽大冒险蛮岳通关方法
-
26-04-09
-

- 盛世龙城新手如何玩
-
26-04-09