那些没跑完半马的机器人,卡在哪儿了?
时间:26-04-22
人形机器人半马:摔倒即数据,限时即倒逼
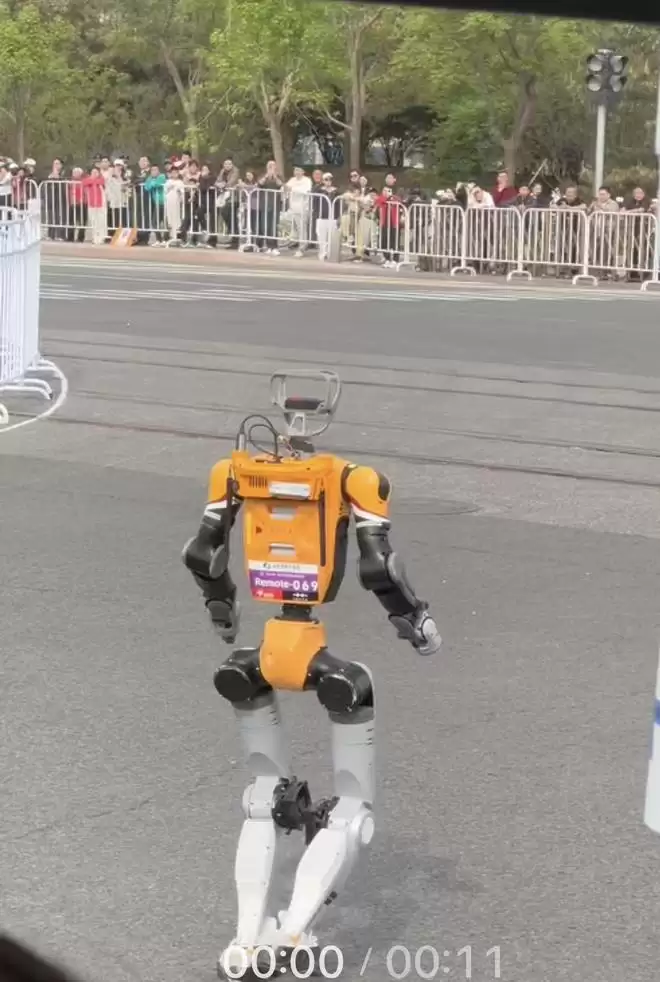
4月19日,北京亦庄的人形机器人半程马拉松现场,观众们不仅惊叹于“闪电”机器人跑赢人类的速度,还发现了一个有趣的现象:相比去年,今年赛场上“翻车”的场面似乎少了一些。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
数字或许更能说明问题。今年共有102支赛队参赛,最终完赛队伍达到47支。其中,依靠自主导航跑完全程的有18支,通过遥控方式完赛的则有29支,整体完赛率超过了45%。这个成绩,与去年首届赛事仅有6支队伍成功完赛的情况相比,进步可谓显著。
正如清华大学自动化系研究员赵明国所总结的,通过这场比赛可以清晰地看到,机器人的硬件可靠性、续航能力以及自主决策水平,都在实实在在地改进。
当然,比赛过程远非一帆风顺。第一财经记者在现场观察到,仍有不少机器人在鸣枪开跑后状况百出。有的直接倒地不起,等待场边工程师的“救援”;也有的受限于比赛关门时间,最终未能完成全程。
然而,对于机器人研发而言,这些“状况”恰恰定义了比赛最真实的价值。每一次摔倒,都是一次宝贵的数据采集;每一次时间限制,都是一次对系统稳定性的倒逼。人形机器人的技术迭代,正是在这种高压的实战环境中完成的。
一个生动的例子是被称为“最萌小鼻嘎”的机器人“小派”。它身高仅75厘米,去年参赛时,跑到100米就“罢工”了。而到了今年,这个小家伙硬是迈着标志性的小碎步,完成了10公里的赛程。对它自身而言,这无疑是一次巨大的飞跃。

“小派”的研发方、高擎动力负责人张君晖在接受采访时坦言,今年最大的进步在于实现了自主导航决策。他生动地描述道:“它这一路摔了很多次,工程师也扶了很多次,最后一次连头壳都摔掉了。”对他们来说,参赛的目的并非争夺名次,而是进行真实场景下的极限压力测试。经过整整一年的迭代,“小派”在硬件成熟度、耐用性以及算法稳定性上都有所提升,续航也做到了每小时更换一次电池。
首次参赛的西湖机器人团队则经历了另一种挑战。其团队成员介绍,他们的机器人在跑步过程中并未摔倒,但在中途因电机温度异常,不得不启用备用机登场。最终,由于整体配速策略较为保守,机器人在11.4公里处被赛会的关门车追上,遗憾止步。
值得注意的是,一些赛前被看好的热门选手,实际表现却不及预期。一位化名张峰的参赛厂商技术人员回忆,在之前的测试赛中,宇树机器人速度很快,但荣耀机器人更快,其表现曾让现场不少人感到震撼。
他观察到,面对强劲对手,部分厂商在赛前几天临时调整了策略。例如,让机器人的奔跑姿态更前倾,并在热控系统上做了加强处理。这种偏激进的调整,本质上是为了提升速度而牺牲了低速状态下的稳定性,这或许是一些机器人在比赛中间出现摇晃甚至倒下的原因之一。
西湖机器人团队负责人也承认,本次参赛成绩暂未达到预期,后续将对电机散热、能耗管理、结构强度等方面进行集成优化。
那么,当前阻碍人形机器人稳定完成长距离任务的核心瓶颈究竟在哪里?科技部国家科技专家库专家周迪高级工程师分析指出,问题主要集中在几个方面:长距离高强度运动导致关节电机过热、扭矩精度骤降;长时间续航与能耗管理能力不足;电池负载持续拉满引发动力输出不稳定;以及动态平衡算法在长时间运行下的可靠性欠缺,误差累积最终导致姿态失控。
他强调,这些问题共同反映了人形机器人从“短时演示”迈向“长时实用”之间存在着一道技术鸿沟,而这正是其商业化落地必须突破的关键障碍。
此外,一家机器人厂商的相关业务负责人补充道,当机器人的基础运动性能逐步提升后,行业的难点正转向更高阶的智能层面。目前,具身智能大模型还“不够聪明”,难以支撑机器人在大规模、多样化场景中落地应用。
这也与西湖机器人团队负责人的判断不谋而合。他认为,半马长距离赛程主要考验的是机器人硬件本体在实际场景中的持续运作能力。而行业未来的发展方向,终究是通用“大小脑”的比拼——即机器人完成复杂任务的能力与泛化性,这才是决定其真正价值的终极赛场。
这就是那些没跑完半马的机器人,卡在哪儿了?的全部内容了,希望以上内容对小伙伴们有所帮助,更多详情可以关注我们的菜鸟游戏和软件相关专区,更多攻略和教程等你发现!
专题合集
精彩合集,奇葩无下限相关文章








大家还在看
-

- 《星空》技能加点攻略-飞船驾驶与实用技能推荐
-
26-04-26
-
- 据报道,大秘境额外拾取(Bonus Rolls)存在重复掉落问题
-
26-04-26
-

- 《异种航员2》游戏中期技巧分享-第3至4个月生存与进展指南
-
26-04-26
-

- Midnight Patch 12.0.5 全职业最佳虚空锻造额外投掷装备指南
-
26-04-26
-
- 《三国:百将牌》不删档版本常见问题FAQ
-
26-04-26