小马发布世界模型2.0,开创让AI自己学开车的“驾校”
当AI驾驶能力超越人类,谁将成为它的“进化导师”?

L4级自动驾驶正从技术验证迈向规模化商业部署,一个关键挑战随之凸显:当系统的驾驶能力已超越其人类设计者,如何构建一个持续、高效且低成本的自我进化闭环?
近期,自动驾驶公司小马智行(PONY)发布的PonyWorld世界模型2.0,不仅是一次技术升级,更标志着研发范式的根本性迁移——从“人类经验驱动”转向“AI数据驱动”。
在这一新体系中,AI的角色发生了质变:它不再是单纯执行指令的“学员”,而是演变为能够自我诊断、定向优化,并反向指导研发流程的“首席进化官”。
构建AI的“自我进化”飞轮
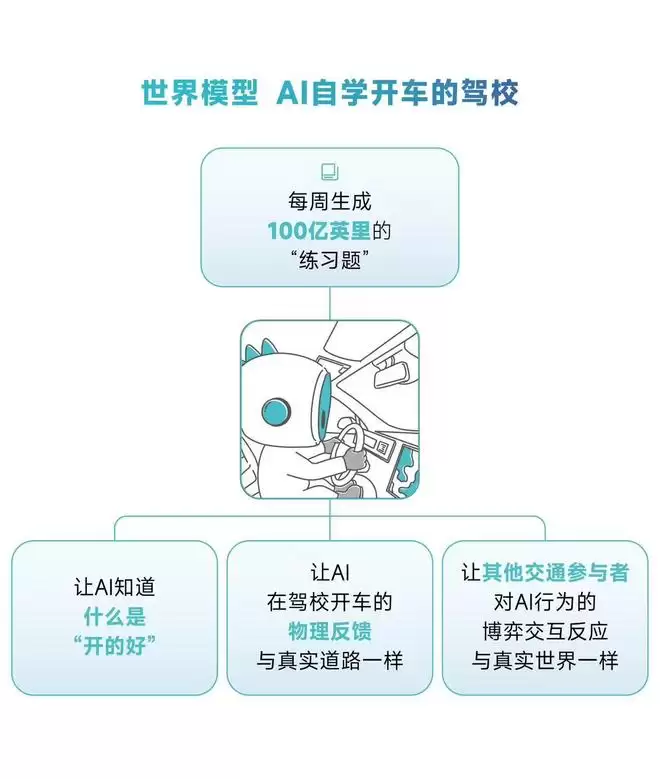
小马智行自2020年启动世界模型研发,其核心目标明确:突破“模仿人类驾驶”的局限,转向以“驾驶性能最优”为目标的强化学习路径。这一逻辑与AlphaGo的突破异曲同工——不依赖历史经验,而是通过自我博弈探索超越认知的解决方案。

相较于1.0版本,世界模型2.0的本质进化在于AI获得了“元认知”与自主优化能力,大幅降低了对人工问题定位与任务分配的依赖。这一突破由三大核心能力支撑:
第一,结构化自我诊断。 借助车端模型中的“Intention(意图)语义层”,系统能清晰追溯每一次驾驶决策的逻辑链。例如,它可结构化表述:“此处减速,源于预判右前方行人存在横穿意图。”这种能力使系统能自动归因,精准区分问题源自感知、意图生成还是动作执行环节。
第二,精准定向进化。 基于诊断结果,世界模型2.0能主动识别自身在特定场景下的精度短板,并自动生成颗粒度极高的数据采集指令。例如:“请在晚高峰时段(16:30-17:30),于A、B、C路口重点采集逆光环境下非机动车与行人混流数据。”工程师的角色从而从依赖主观经验的“决策者”,转变为高效执行AI指令的“协同执行者”。
第三,训练效率倍增。 系统能自动过滤已熟练掌握的常规场景,将算力集中攻坚薄弱环节,显著减少无效计算与存储消耗。
这些变革共同构建了一个强大的“精度飞轮”:大规模L4无人车队路测运营,持续产生富含交互价值的高质量真实数据 → 数据驱动世界模型精度提升 → 增强车端模型实际驾驶能力 → 更强能力支撑更大规模部署 → 产生更多高阶数据。如此循环,形成自增强闭环。
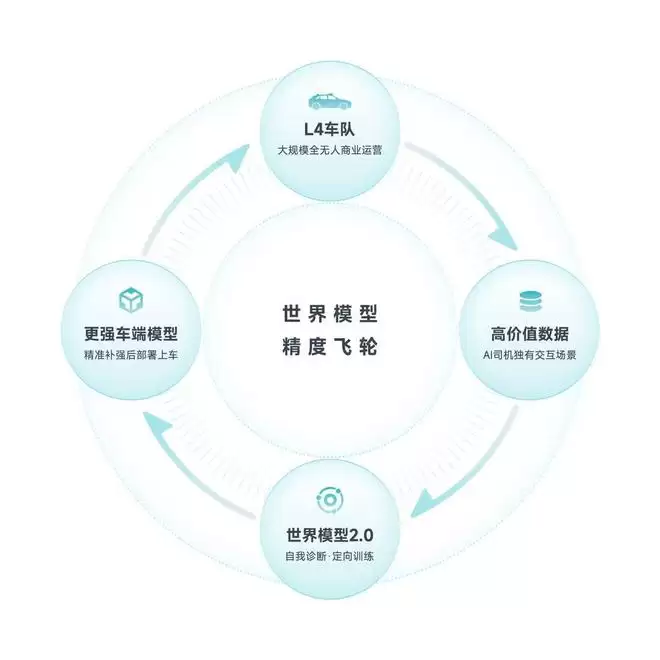
这里存在一个关键转折:当AI驾驶能力显著超越普通人类驾驶员后,传统人类驾驶数据的边际效益已趋近于零。唯有AI在纯无人驾驶模式下产生的、千万公里级的真实交互数据,才是推动世界模型持续进化的核心燃料。这也构成了该技术路径难以逾越的结构性壁垒。
人类角色转型:从“教练”到“协同执行者”
世界模型2.0的影响远不止于技术架构,它正在重构整个研发组织的运作范式。
自动驾驶研发早期高度依赖工程师经验:人工设计规则、标注数据、判断训练优先级,效率天花板明显。当AI驾驶水平实现反超,人类经验性指导反而可能成为模型迭代的噪声——这正是小马智行推动范式变革的核心逻辑。
随着世界模型2.0落地,人类工程师的角色发生根本性迁移:从教导AI的“驾校教练”,转型为响应AI精准需求的“定向数据采集员”与“系统运维者”。
研发、测试、运营团队开始围绕世界模型2.0输出的“精度需求清单”协同工作。模型指出短板,团队就补充对应数据;模型标识场景缺口,车队就开赴特定区域进行靶向测试。
“研发人员在为世界模型2.0工作。”这已非戏言,而是一种正在落地的全新研发范式。行业共识是,L4级自动驾驶对安全性的要求是绝对的,普通人类驾驶数据的提升价值微乎其微,只有AI在复杂真实路况中产生的、富含博弈与交互的独特数据,才能持续驱动模型向更高阶智能进化。
从技术路线看,小马智行选择了一条特色路径:绕过“语言层”这一中间表示,让传感器数据直接映射至驾驶动作,并辅以可解释的Intention意图层。此举优势在于降低算力开销的同时,使物理世界建模更直接高效,与部分厂商采用的VLA(视觉-语言-动作)路线形成鲜明对比。
从这个视角审视,小马智行在自动驾驶领域的深度探索,正为其开启通往更广阔物理AI世界的大门。这场由世界模型2.0引领的研发范式革命,或将重塑人工智能与物理世界交互的未来格局。
采写:南都·湾财社记者 胡雯雯